
Hovermap has been engineered to operate autonomously when attached to a compatible robot or vehicle. It can take these platforms into unsafe places, or where it is simply impossible to go with other systems. In response to a failure during Autonomy-assisted missions, Hovermap has a range of operational smart failsafes to ensure safe and reliable operation.
Only one failsafe can be active at any given time. Therefore, failsafes are ordered in a prioritized list as indicated by the priority number in the table below. In case multiple failsafes are triggered, the one with the lowest priority number will be prioritized.
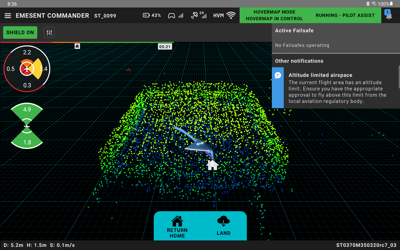
When a failsafe is triggered, it will be displayed as a notification in the Active Failsafe area beside the Notification button. Click that notification to see more detailed information about the failsafe. All other notifications (if any) are shown below the failsafe in order of severity.
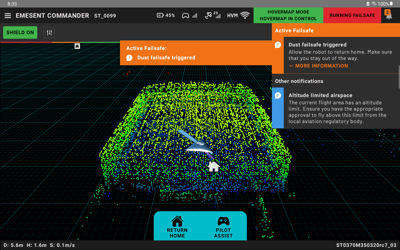
When a failsafe is active, no other notifications will appear in the Main View. They can still be shown by clicking the Notification button.
Once the failsafe has been completed, it will be removed from the Active Failsafe area and notifications are displayed as per normal operation.
Robot Link Loss
Priority: 1
Description | The link between the robot and Hovermap has been lost. |
Hovermap Response | Hovermap will try to re-establish a connection with the robot and take control of the robot. |
Operator Action | Take manual control of the robot and land immediately. Do not take off if the robot is on the ground. |
Prerequisite | N/A |
Abort-able | This failsafe will self-abort when the connection to the robot has been re-established. |
Control Authority Denied
Priority: 2
Description | The robot is not allowing Hovermap to take control. |
Hovermap Response | Hovermap will keep requesting control of the robot. |
Operator Action | Land the robot immediately. |
Prerequisite | N/A |
Abort-able | The failsafe will self-abort when the robot allows Hovermap to take control. |
Control Authority Loss
Priority: 3
Description | Hovermap has lost control and authority over the robot. |
Hovermap Response | Hovermap will attempt to re-acquire control of the robot |
Operator Action | Take manual control of the robot and land immediately. |
Prerequisite | N/A |
Abort-able | The failsafe will self-abort when Hovermap re-acquires control of the robot. |
Robot Control Not Take-able
Priority: 4
Description | Hovermap indicates that it can’t take control of the Robot. |
Hovermap Response | Hovermap will monitor the state of the robot to check when it can take control. |
Operator Action | Land the robot immediately. |
Prerequisite | N/A |
Abort-able | The failsafe will self-abort when Hovermap assesses that it is safe to do so. |
Hardware Integrity
Priority: 5
Description | Hovermap has detected that the robot has sustained physical damage. |
Hovermap Response | Hovermap will attempt to put the robot into a safe state. |
Operator Action | If safe to do so, take manual control of the robot, land, and disarm the motors immediately. |
Prerequisite | N/A |
Abort-able | Not abort-able |
Launch Error
Priority: 6
Field | Details |
|---|---|
Description | Hovermap has aborted a take-off. |
Hovermap Response | Monitor the drone as it disarms or lands. Ensure that the shield settings are set appropriately, there are no objects in the vicinity of the robot, and attempt to re-launch. |
Operator Action | N/A |
Prerequisite | N/A |
Abort-able | Not abort-able |
State Estimation Critical
Priority: 7
Description | Hovermap has lost all of its navigation sources (SLAM and GPS). |
Hovermap Response | Hovermap will Land the robot. |
Operator Action | Take manual control of the robot and land immediately. |
Prerequisite | N/A |
Abort-able | Not abort-able |
Battery Critical
Priority: 8
Description | Hovermap has detected that the robot’s battery source has reached a critical level. |
Hovermap Response | Hovermap will land the robot. |
Operator Action | Monitor |
Prerequisite | N/A |
Abort-able | Not abort-able |
Path Planner Stuck (Heavy Dust)
Priority: 9
Description | Hovermap has detected that it is not able to navigate through the environment. |
Hovermap Response | The robot will retrace its path back through the environment for 30 meters or until it gets to home. |
Operator Action | Monitor |
Prerequisite | N/A |
Abort-able | The user can abort the failsafe at any time via the Commander app. The user can abort the failsafe at any time by toggling the flight mode switch out and back into Hovermap mode twice (double toggle). |
Lidar Data Integrity
Priority: 10
Description | Hovermap has detected that its lidar points are starting to not be able to reach the objects around it due to atmospheric conditions. |
Hovermap Response | Hovermap will start to Return to Home immediately to remove itself from the atmospheric conditions. |
Operator Action | Monitor |
Prerequisite | N/A |
Abort-able | The user can abort the failsafe at any time via the Commander app. The user can abort the failsafe at any time by toggling the flight mode switch out and back into Hovermap mode twice (double toggle). |
Once the Lidar Data Integrity failsafe triggers there will be a constant notification advising to return home immediately. This notification will persist for the remainder of the mission, even after the Lidar Data Integrity failsafe has been aborted by the user.
State Estimation Degraded
Priority: 11
Description | Hovermap has lost its primary source of navigation. |
Hovermap Response | Hovermap will wait for up to 10 seconds to regain a navigation source (SLAM or GPS) If a navigation source is acquired, Hovermap will initiate a Return to Home. If after 10 seconds a navigation source is not acquired, the ‘State Estimation Critical’ failsafe will be triggered. |
Operator Action | Monitor |
Prerequisite | N/A |
Abort-able | The user can abort the failsafe at any time via the Commander app. The user can abort the failsafe at any time by toggling the flight mode switch out and back into Hovermap mode twice (double toggle). |
Once the State Estimation Degraded failsafe has been aborted, it will not trigger again until the robot has landed and disarmed.
Battery Low
Priority: 12
Description | Hovermap has detected that the robot’s battery source has reached a low level. |
Hovermap Response | Hovermap will initiate a Return to Home sequence |
Operator Action | Monitor |
Prerequisite | N/A |
Abort-able | The user can abort the failsafe at any time via the Commander app. The user can abort the failsafe at any time by toggling the flight mode switch out and back into Hovermap mode twice (double toggle). |
Once the low battery failsafe has been aborted, it will not trigger again until the robot has landed and disarmed.
GCS Link Loss
Priority: 13
Description | Hovermap has detected that it has lost its connection to the Commander App and has reached its final waypoint with no further instruction. |
Hovermap Response | Hovermap will initiate a Return to Home sequence |
Operator Action | Monitor |
Prerequisite | The GCS Link Loss failsafe will only trigger if the robot arrives at the last user-defined waypoint and the GCS link has been lost |
Abort-able |
|
RC Link Loss
Priority: 14
Description | Hovermap has detected that the robot no longer has a link to its remote control unit and is being operated in Teleoperate mode. |
Hovermap Response | Hovermap will initiate a Return to Home Sequence |
Operator Action | Monitor |
Prerequisite | The RC Link Loss failafe will only trigger if the robot is being operated in Pilot Assist mode and the RC link is lost. |
Abort-able |
|
Data Recording Stopped
Priority: 15
Description | The remaining data storage is below 2GB. |
Operator Action | Land |
Prerequisite | N/A |
Abort-able | Not abort-able |
Data Storage Critical
Priority: 16
Description | The remaining data storage is below 5GB. |
Hovermap Response | Hovermap will initiate a Return to Home Sequence |
Operator Action | Monitor |
Prerequisite | N/A |
Abort-able | The user can abort the failsafe at any time via the Commander app. |
Not Ready to Arm
Priority: 17
Description | Hovermap has detected that it is not yet in a state for the robot to be armed. |
Hovermap Response | Hovermap will send a notification to the user. |
Operator Action | Do not attempt to take off. |
Prerequisite | N/A |
Abort-able | Not abort-able |
CPU Temperature High
Priority: 18
Description | Hovermap has detected that its CPU temperature is reaching a high limit. |
Hovermap Response | Hovermap will send a notification to the user. |
Operator Action | Take care when handling the Hovermap payload. The heatsink on the payload may be hot. |
Prerequisite | N/A |
Abort-able | Not abort-able |
Data Storage Low
Priority: 19
Description | The remaining data storage is below 20GB. |
Hovermap Response | Hovermap will send a notification to the user. |
Operator Action | Monitor Consider returning to home before data storage is exhausted |
Prerequisite | N/A |
Abort-able | Not abort-able |